Wednesday 31 July 2002
Dandroid 2002 on video
For some reason the head stopped moving correctly, but you get the idea. The robot is not remote controlled and navigates as best it can (which was not great), in the confined space.
Saturday 8 June 2002
Dandroid 2002: Junkbot
The robot now had enough sensors and some blinking lights from a toy I found being thrown away to give it some personality. To avoid motor increasing sensor interference, there was now two power supplies, one for drive motors, the others for CPU and sensors.


Monday 25 March 2002
Dandroid 2002: The Water Tower
This new ARobot base design allowed for more sensors. The plastic bottle to raise a digital compass away from the motor magnets below.


Saturday 2 March 2002
Dandroid 2002: Cookie Box Exoskeleton
Living in a tiny flat and without any tools, I'd look for suitable materials to make a robot body. It was a bonus if you had to eat two boxes of cookies as part of the job! There is sonar system mounted above the ARobot board here. While I thought it looked great, mounting more sensors going to be difficult with the internal wiring and no means to build an internal support structure.


Monday 25 February 2002
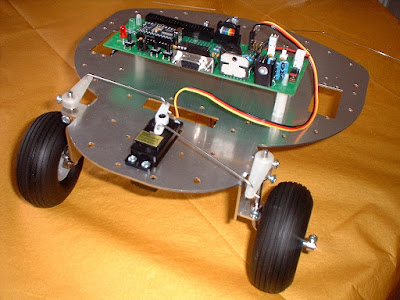
The ARobot Chassis
I somehow stumbled upon (or perhaps I searched for days on-line) a robot chassis to build upon. The idea of Lego was always around, but despite how great Lego bricks are there is one serious problem: your robot looks like Lego! For this reason, I try to avoid wood and stick with metal and plastic for robot parts.
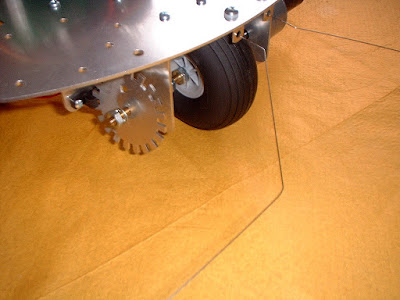
The ARobot kit included a programmable BASIC Stamp chip, a metal platform and a geared motor plus a simple, but clever whisker system to detect when this metal plate was about to smash into a wall.


Subscribe to:
Posts (Atom)